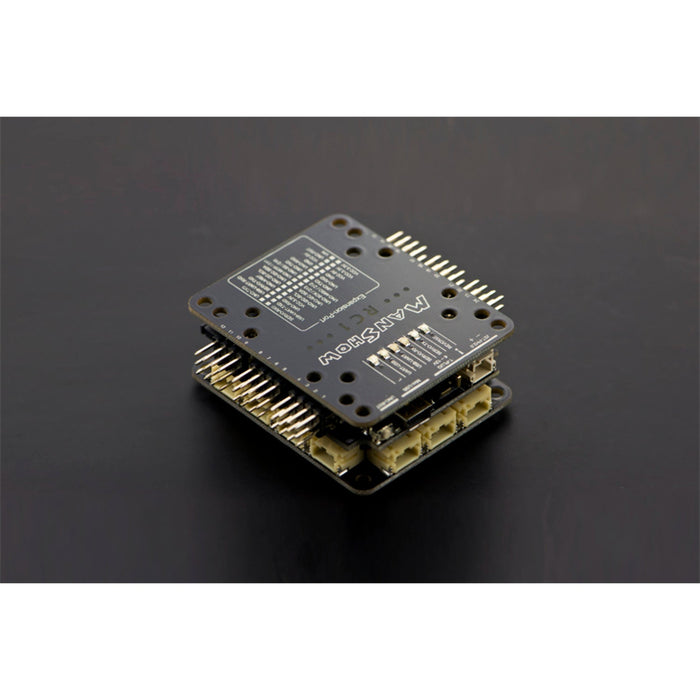


ManShow-RC1 (Robot Controller)
This ManShow-RC1 is Discontinued Now, We recommend GMR - General Mobile Robot controller as a suitable replacement.
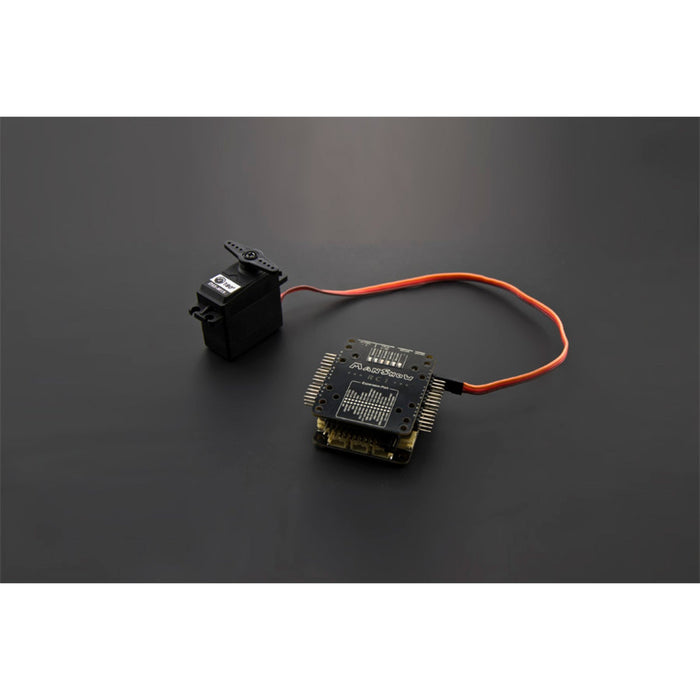
ManShow-RC1 is mainly designed for humanoid robots, bionic robots and arms with a highly integrated structure(of course, it can also be used for other robotic systems), which integrates Arduino UNO R3 and SoftServo system(for 24 PWM-Style servos). The rich Arduino resources, standard connectors(for sensors) and servo control system (flexible, high-efficiency and stable), which make it easier and quicker to creat your own robots.
FEATURES
For SoftServo:
- Simultaneous PWM signals output (in other words, they almost have the same rising edge), and the actual resolution is up to 1µs.
- Low signal coupling which is visually undetectable, just like all the PWM signals are generated by separate hardware.
- Soft-Start function. As we all know, the initial position of the PWM-Style servo is typically unknown. Conventional-Start mode makes servo rotate to the goal position with full speed, which is unsatisfactory in most robotic applications. Soft-Start mode can make servo rotate slowly when the current position is unknown, but need more current in a short time. It is suggested that all the servos should be started in time-sharing mode to reduce the electric current when you need to control several servos.
- Flexible cycle, the minimum PWM-Effective-Width and the maximum PWM-Effective-Width can be set flexibly, which makes all the PWM-Style servos compatible.
- Based on subdivision algorithm, the maximum subdivision value is up to 250. The position and the speed of each channel can be controlled separately, which is conductive to robot dynamic control. The speed depends on the subdivision(see below).
- All the PWM signals can be terminated by setting the equivalent position value to 251 at any time, which is extremely useful for protecting the servo.
- Stable and high-efficiency UART, and the baud rate can be detected automatically. There is no instruction packet loss when the baud rate is not higher than 28800bps, otherwise the first instruction packet will be discarded. Furthermore, it is recommended to send the sync bytes(0xff 0xff 0xff 0xff) first when the baud rate is higher than 28800bps.
- Stable and high-efficiency I2C.
- Most of the digital and analog ports are extended in JST-PH2.0-3P (Digital: 10 channels / Analog: 4 channels), which make it easier to connect sensors (pins are defined as 1-SIGNAL, 2-VCC and 3-GND, and marked on the silkscreen).
- Flexible power supply of JST-PH2.0-3P (Digital Ports: 5V or Vin / Analog Ports: 3.3V or 5V)
- The remaining pins of Arduino UNO R3 for extended-applications are led out on header (2*14 pins, 2.54mm pitch, simplified as "Expansion-Port" below), which can extend three communication interfaces (UART, I2C and SPI), establish three types of connections (USBUARTUNO, USBUARTSoftServo or UNOUARTSoftServo), set the reference voltage for the ADC of Arduino UNO R3 to 3.3V and so on. For details about Arduino UNO R3.
SPECIFICATIONS
- Supply Voltage: DC 6~12V (Mini-T Plug or JST-PH2.0-2P)
- Size: 58.2mm * 62.2mm * 23.5mm(2.29"*2.45"*0.93") L*W*H (Note: The size and mounting holes of circuit board are designed in strict compliance with the rule of Gicren Robotics and Electronics.ManShow-RC1 is not a standard device of Gicren's product line, soit does not fully comply with the rule)
- Two communication interfaces between Arduino UNO R3 and SoftServo system (for 24 PWM-Style servos): I2C(fixed, 100KHz) and UART (selectable, 1200 ~ 115200bps). These two communication interfaces share the same user registers, and the baud rate of the UART can be detected automatically. Please refer to the corresponding communication protocols for details (GI2C_Vxx / G485_Vxx)
The ManShow-RC1 (Robot Controller) appears in the following collections:
SKU DF-DRI0034
by Little Bird