UAV V3 Development Platform
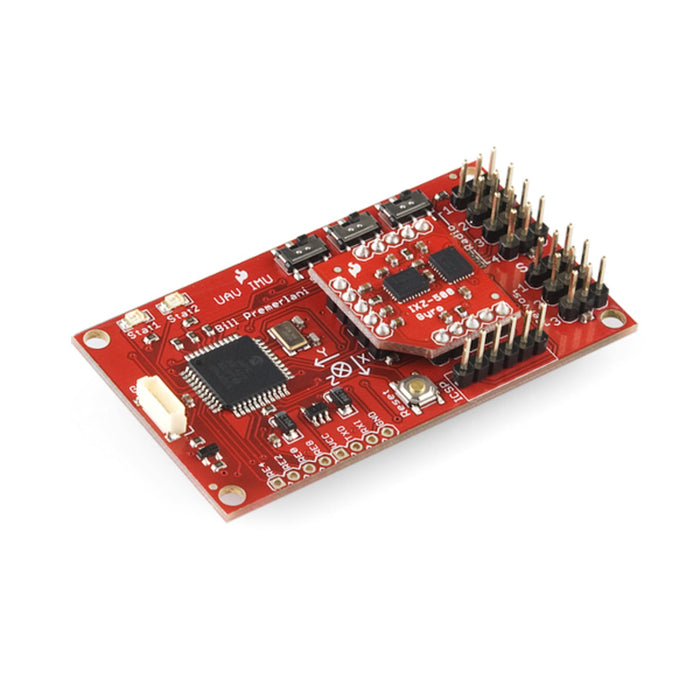
The UAV Development Board v3 (UDB3) is a versatile flight controller platform for building autonomous vehicles. Built around a dsPIC30F4011 CPU with an MMA7260 three-axis accelerometer and two dual-axis IXZ500 gyros, it provides the sensors and processing power needed for stable IMU control and GPS-based navigation.
By itself the board functions as a three-axis IMU controller. Add a GPS receiver and it becomes a full autopilot for RC cars, planes, helicopters, or boats. The IXZ500 gyros offer enough vibration tolerance for demanding applications like RC helicopters.
Key Features
- dsPIC30F4011 CPU – Powerful microcontroller for real-time control and navigation
- MMA7260 Accelerometer – Three-axis sensing for orientation and motion detection
- Dual IXZ500 Gyros – Two dual-axis gyroscopes with high vibration tolerance
- GPS Compatible – Supports EM406 and the faster, more accurate UBlox GPS modules
- Open Source Firmware – Ships with self-testing firmware; fully functional open source autopilot firmware also available
- 6-Pin Debug Header – For programming via PICkit3 (pin next to reset button is VPP)
Ideal For
- Building autonomous RC planes, cars, helicopters, or boats
- Developing custom UAV autopilot firmware
- IMU and navigation system experimentation
- Robotics research and development
Specifications
- Weight – 34 g (controller and GPS)
Tip: A PICkit3 programmer is recommended for flashing firmware to the board.
The UAV V3 Development Platform appears in the following collections:
SKU SF-GPS-09980
by Little Bird