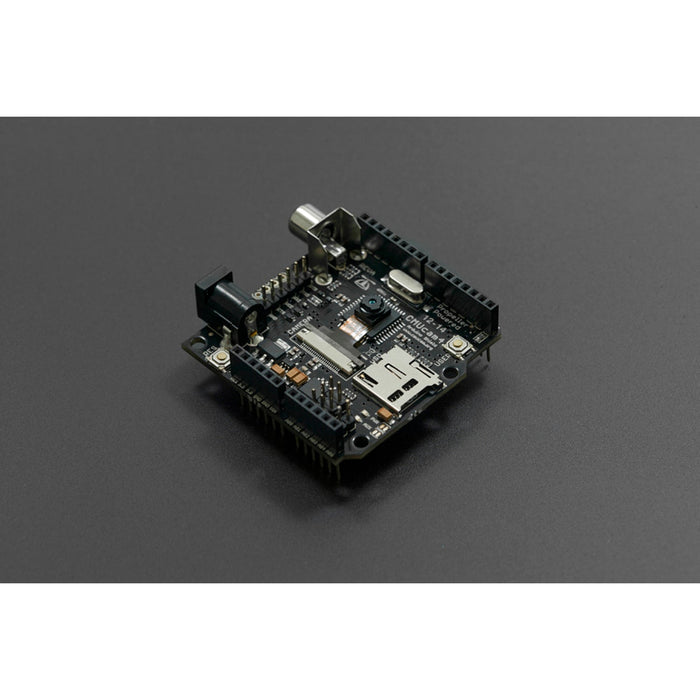
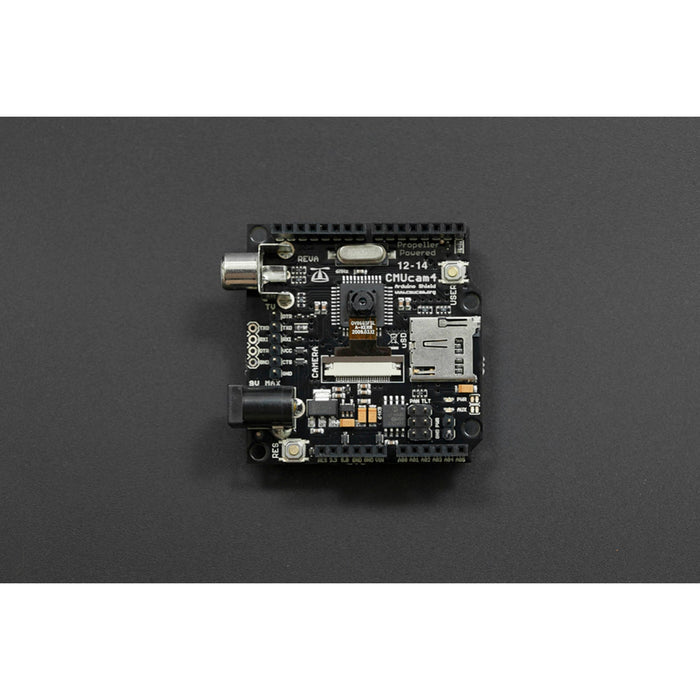

CMUcam4 Arduino Shield
The CMUcam4 Arduino Shield is a programmable embedded colour vision sensor developed as part of Carnegie Mellon University's CMUcam project. Built around the Parallax Propeller (P8X32A) processor and an OmniVision 9665 CMOS camera module, it provides real-time colour tracking, image statistics, and basic motion detection for robotics and embedded systems.
The CMUcam4 can track user-defined colour blobs, generate histograms, capture segmented images, and output analogue video — all at up to 30 frames per second. It communicates via TTL UART and includes a microSD slot for image storage and data logging.
Discontinued: This product has been discontinued and is available while stock lasts.
Key Features
- Colour Blob Tracking – Track user-defined colours in RGB or YUV colour space in real time
- VGA Camera Sensor – 640×480 resolution, RGB565/YUV655 colour, 30 FPS processing
- Image Statistics – Mean, median, mode, and standard deviation from sampled frames
- Segmented Image Capture – Binary thresholded images for line following and shape recognition
- Histogram Generation – Up to 128 bins for colour analysis
- MicroSD Storage – FAT16/32 support for image dumps and data logging
- Dual Servo Controller – Pan and tilt outputs with 1 µs resolution at 50 Hz
- Analogue Video Output – NTSC/PAL monochrome output with tracking overlay
- Arduino Shield Compatible – With interface libraries for Arduino and BASIC Stamp
- Fully Open Source – Reprogrammable via Parallax Propeller Tool
Specifications
- Processor – Parallax P8X32A (Propeller Chip)
- Camera – OmniVision 9665 CMOS, VGA (640×480)
- Processing Resolution – QQVGA (160×120) onboard
- Serial Interface – TTL UART, up to 250,000 baud (default 19,200)
- Storage – MicroSD/microSDHC slot, FAT16/32
Applications
- Robot navigation, object detection, and tracking
- Line following with branch detection
- Product inspection and quality control
- Occupancy sensing and surveillance
- Educational robotics and interactive toys
Package Contents
- 1× CMUcam4 Arduino Shield
Resources
The CMUcam4 Arduino Shield appears in the following collections:
SKU DF-SEN0122
by Little Bird