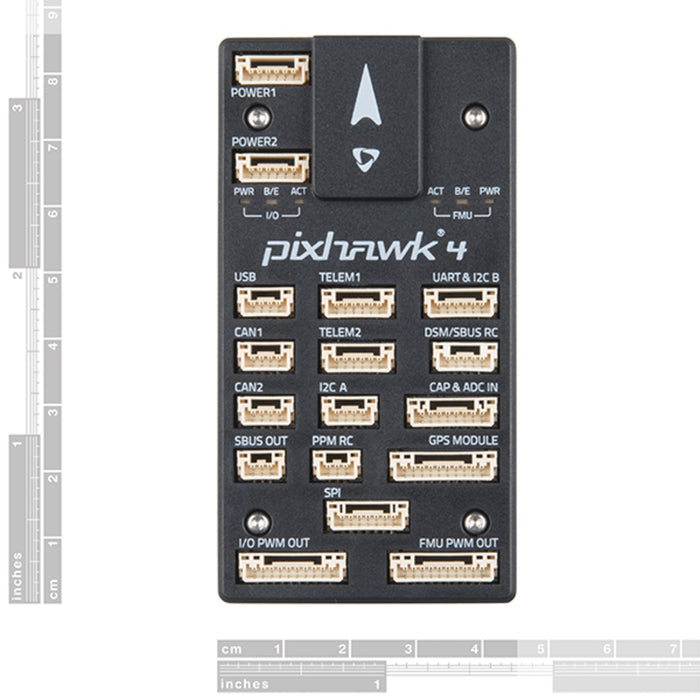







Pixhawk 4 Flight Controller
The Pixhawk 4 is an advanced flight controller designed by Holybro and Auterion for the PX4 autopilot platform. Built around an STM32F765 ARM Cortex-M7 processor (216 MHz, 2 MB flash, 512 KB RAM) with a dedicated STM32F100 I/O co-processor, it delivers the processing power needed for complex autonomous flight algorithms.
The board features dual IMUs (ICM-20689 and BMI055), an IST8310 magnetometer, and an MS5611 barometer — all with vibration isolation and dedicated data-ready interrupt lines for precise time-stamped sensor data. PX4 firmware comes preinstalled on a NuttX real-time operating system.
Key Features
- STM32F765 FMU Processor – 32-bit ARM Cortex-M7 at 216 MHz with 2 MB flash and 512 KB RAM
- STM32F100 I/O Co-Processor – 32-bit ARM Cortex-M3 at 24 MHz for servo/PWM output
- Dual IMU – ICM-20689 and BMI055 accelerometer/gyroscope with vibration isolation
- Magnetometer & Barometer – IST8310 magnetometer and MS5611 barometric pressure sensor
- PX4 Preinstalled – Ready to fly with the latest PX4 firmware on NuttX RTOS
- Extensive I/O – 8–16 PWM outputs, 3 capture inputs, R/C input (CPPM, Spektrum/DSM, S.Bus)
- Expansion Buses – 2 external SPI buses (6 chip selects), 4 I²C buses (2 external, 2 for GPS/Compass)
Specifications
- FMU Processor – STM32F765, ARM Cortex-M7, 216 MHz
- I/O Processor – STM32F100, ARM Cortex-M3, 24 MHz
- Accelerometer/Gyro – ICM-20689 + BMI055 (dual redundancy)
- Magnetometer – IST8310
- Barometer – MS5611
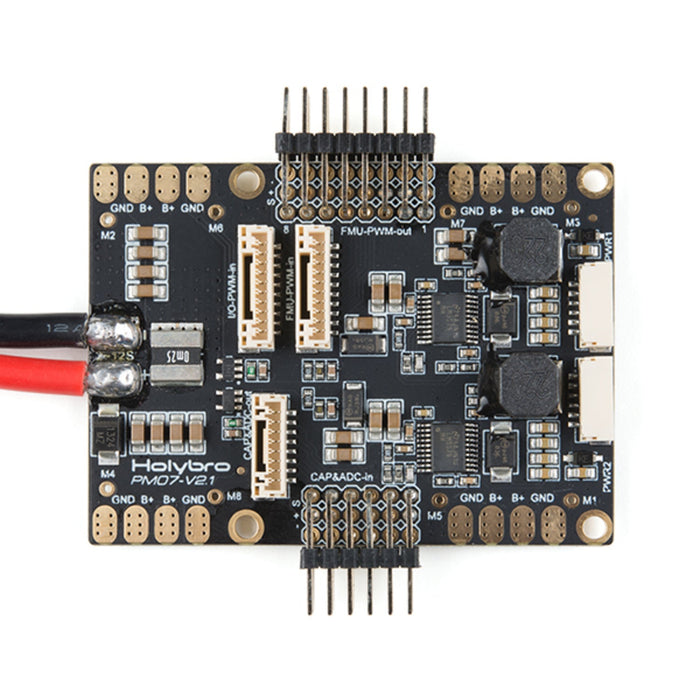
- PWM Outputs – 8–16 (8 from I/O, 8 from FMU)
- Power Module Output – 4.9–5.5 V, up to 120 A current sensing
- USB Power Input – 4.75–5.25 V
- Operating Temperature – −25 °C to +85 °C
- Dimensions – 44 × 84 × 12 mm
- Weight – 33.3 g
Ideal For
- Autonomous drones and multirotor builds
- VTOL and fixed-wing UAV platforms
- Autonomous vehicle and robotics research
- PX4 and ArduPilot development
Resources
The Pixhawk 4 Flight Controller appears in the following collections:
SKU SF-ROB-14841
by SparkFun