Adafruit
Mini Round Robot Chassis Kit - 2WD with DC Motors
This kit gives you everything you need to build the shell of a 2-wheel-drive Mobile Platform Robot! You get the metal plates that make up the chassis, two...
Get notified when back in stock
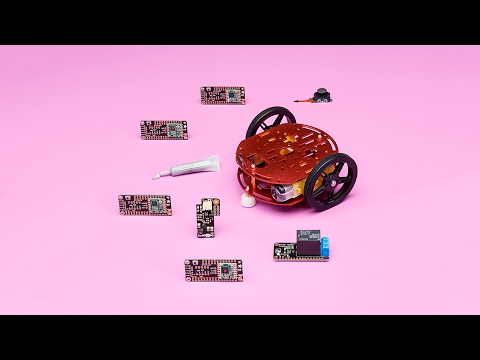
This kit gives you everything you need to build the shell of a 2-wheel-drive Mobile Platform Robot! You get the metal plates that make up the chassis, two DC drive motors with matching wheels, and a caster ball for balance. You'll fill in the rest with a power supply, microcontroller board, and motor controller. The differential drive (two separately driven wheels) allows for a near zero turning radius while the high-strength aluminum alloy body plus high-quality high-speed motors make it suitable for flat indoor surfaces. Also it's adorably small!
We of course have suggestions to run the motors like our TB6612 breakout, Motor FeatherWing, Motor Shield for Arduino, or Motor HAT for Raspberry Pi. Basically anything that can do two bi-directional brushed DC motors at ~5V and 1.5 Amp peak. To steer the wheels, you'll need something to toggle the motor driver like our Feather 32u4 Bluefruit LE, which we used in our demo, and to power the robot/microcontroller we used a Lithium Ion Battery - 3.7v 2000mAh, but this is all up to you and your imagination!
Note: LiPoly Battery, Feather board, FeatherWings, and Feather accessories are not included! This is just the body of the mobile platform robot.
Kit includes:
- 2x Drive Motors (drive with 3-6VDC, 200-400 mA run, 1.5A hard stall)
- 2x Wheels
- 1x Plastic Caster Ball
- Anodized aluminum frame and all mounting hardware for assembly
Jargon buster
Plain-language definitions for the technical terms used above.
- DC
- DC means direct current, where electricity flows in one constant direction, as supplied by batteries, USB ports and many plug-pack power supplies. When a product specifies DC, it runs from a DC supply rather than mains AC, so you need to provide the correct voltage and polarity.
- microcontroller
- A microcontroller is a small computer on a single chip that runs a stored program and controls connected inputs and outputs such as buttons, sensors, displays and communication interfaces. In a device built around one, it is the part that executes the code and coordinates the device's behaviour.
- motor driver
- An electronic circuit that lets a low-power controller switch and control a motor that needs more current than the controller pins can safely provide. Checking motor driver support matters because pumps and motors usually cannot be connected directly to a microcontroller output.
Find this product in
Brands
Robotics & Motion
Related Tutorials
Free guides on learn.littlebird.com.au

