DFRobot
Metal DC Geared Motor w/Encoder - 12V 83RPM 45Kg.cm
This 12 V DC geared motor (model GB37Y3530-12V-83R) pairs a powerful brushed motor with a 131:1 metal gearbox and an integrated Hall-effect quadrature encode...
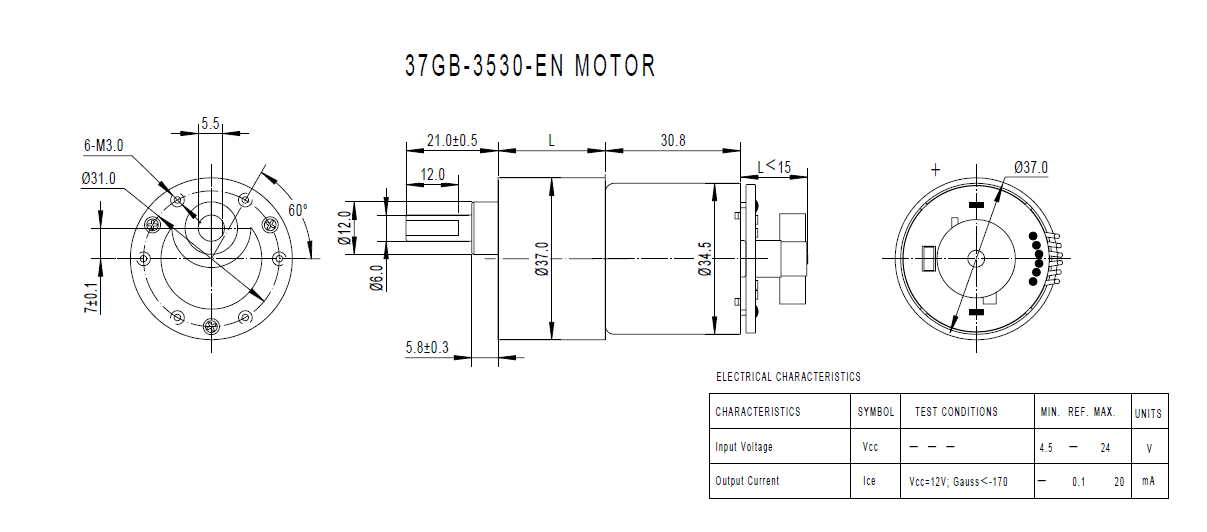
This 12 V DC geared motor (model GB37Y3530-12V-83R) pairs a powerful brushed motor with a 131:1 metal gearbox and an integrated Hall-effect quadrature encoder. The encoder provides 16 counts per revolution on the motor shaft — equivalent to 2096 counts per revolution on the gearbox output — giving precise speed and position feedback for robotics and automation projects.
The 6 mm D-shaped output shaft extends 15.5 mm from the faceplate, which features six evenly spaced M3-threaded mounting holes arranged in a regular hexagon with 15.5 mm centre-to-centre spacing. The motor can begin rotating from as low as 1 V, making it suitable for variable-speed applications.
Key Features
- 131:1 Metal Gearbox – High torque output with durable metal gears
- Integrated Quadrature Encoder – Hall-effect, 16 CPR (motor shaft) / 2096 CPR (gearbox shaft)
- High Stall Torque – 45 kg·cm
- 6 mm D-Shaft Output – 15.5 mm shaft length
- M3 Mounting Holes – Six threaded holes in a hexagonal pattern for secure mounting
Specifications
- Operating Voltage – 12 V DC (starts from 1 V)
- No-Load Speed – 83 ± 10 % RPM
- No-Load Current – 350 mA
- Stall Torque – 45 kg·cm
- Stall Current – 7 A
- Encoder Supply Voltage – 5 V
- Encoder Type – Hall-effect quadrature
- Encoder Resolution – 16 CPR (motor shaft) / 2096 CPR (gearbox shaft)
- Insulation Resistance – 20 MΩ
- Gear Ratio – 131:1
- Weight – 205 g
Ideal For
- Mobile robot platforms and drive systems
- Precision position-control applications
- Automated mechanisms requiring high torque at low speed
Package Contents
- 1× GB37Y3530-12V-83R geared motor with encoder
Resources
Jargon buster
Plain-language definitions for the technical terms used above.
- encoder
- A device attached to a motor or shaft that reports movement, such as rotation steps or position. In a pump system, an encoder can help measure or control how much the motor has turned, which affects how repeatable the watering amount can be.
- kg·cm
- A torque unit often used for hobby servos, meaning how many kilograms of force the servo can hold at a 1 cm arm length. A higher kg·cm rating means the servo can move or hold heavier loads, but power supply current needs may also increase.
- Stall torque
- The maximum twisting force a servo can produce when its output is held still and cannot move. It helps you judge whether the servo is strong enough for a robot joint, steering linkage, or other load.
- Torque
- A twisting force that causes something to rotate, usually measured in newton-metres or kilogram-centimetres. It matters when choosing motors, servos, gears, and tools because higher torque is needed to lift heavier loads, turn larger wheels, or move mechanisms without stalling.
Find this product in
Robotics & Motion
Supplier page — dfrobot.com
Supplier Description · 575.1 KB · Click any page to view full size
Related Tutorials
Free guides on learn.littlebird.com.au


{kind=link}