DFRobot
Metal DC Geared Motor w/Encoder - 12V 83RPM 45Kg.cm
This 12 V DC geared motor (model GB37Y3530-12V-83R) pairs a powerful brushed motor with a 131:1 metal gearbox and an integrated Hall-effect quadrature encode...
Get notified when back in stock
This 12 V DC geared motor (model GB37Y3530-12V-83R) pairs a powerful brushed motor with a 131:1 metal gearbox and an integrated Hall-effect quadrature encoder. The encoder provides 16 counts per revolution on the motor shaft — equivalent to 2096 counts per revolution on the gearbox output — giving precise speed and position feedback for robotics and automation projects.
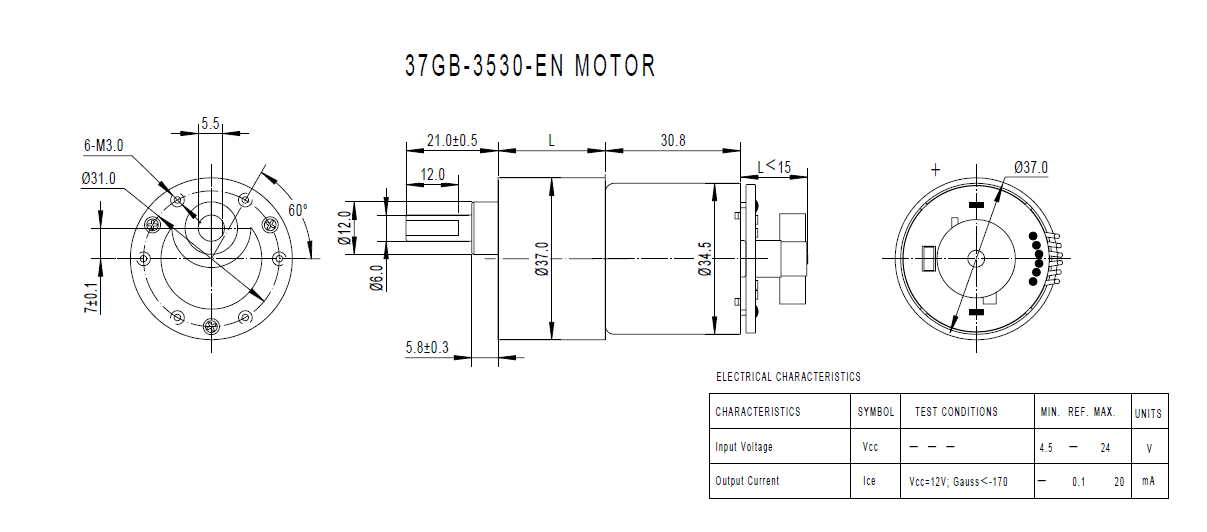
The 6 mm D-shaped output shaft extends 15.5 mm from the faceplate, which features six evenly spaced M3-threaded mounting holes arranged in a regular hexagon with 15.5 mm centre-to-centre spacing. The motor can begin rotating from as low as 1 V, making it suitable for variable-speed applications.
Key Features
- 131:1 Metal Gearbox – High torque output with durable metal gears
- Integrated Quadrature Encoder – Hall-effect, 16 CPR (motor shaft) / 2096 CPR (gearbox shaft)
- High Stall Torque – 45 kg·cm
- 6 mm D-Shaft Output – 15.5 mm shaft length
- M3 Mounting Holes – Six threaded holes in a hexagonal pattern for secure mounting
Specifications
- Operating Voltage – 12 V DC (starts from 1 V)
- No-Load Speed – 83 ± 10 % RPM
- No-Load Current – 350 mA
- Stall Torque – 45 kg·cm
- Stall Current – 7 A
- Encoder Supply Voltage – 5 V
- Encoder Type – Hall-effect quadrature
- Encoder Resolution – 16 CPR (motor shaft) / 2096 CPR (gearbox shaft)
- Insulation Resistance – 20 MΩ
- Gear Ratio – 131:1
- Weight – 205 g
Ideal For
- Mobile robot platforms and drive systems
- Precision position-control applications
- Automated mechanisms requiring high torque at low speed
Package Contents
- 1× GB37Y3530-12V-83R geared motor with encoder
Resources
Jargon buster
Plain-language definitions for the technical terms used above.
- DC
- DC means direct current, where electricity flows in one constant direction, as supplied by batteries, USB ports and many plug-pack power supplies. When a product specifies DC, it runs from a DC supply rather than mains AC, so you need to provide the correct voltage and polarity.
- encoder
- An encoder is a sensor that converts the rotation or position of a shaft, knob or dial into electrical signals, reporting movement as incremental steps and direction, or as an absolute position. It is used to track how far something has turned, which matters for precise positioning, speed control, repeatable movement, or using a rotary knob as an input.
- kg·cm
- A torque unit often used for hobby servos, meaning how many kilograms of force the servo can hold at a 1 cm arm length. A higher kg·cm rating means the servo can move or hold heavier loads, but power supply current needs may also increase.
- Stall torque
- The maximum twisting force a servo can produce when its output is held still and cannot move. It helps you judge whether the servo is strong enough for a robot joint, steering linkage, or other load.
- Torque
- A twisting force that causes something to rotate, usually measured in newton-metres or kilogram-centimetres. It matters when choosing motors, servos, gears, and tools because higher torque is needed to lift heavier loads, turn larger wheels, or move mechanisms without stalling.
Find this product in
Robotics & Motion
Supplier page — dfrobot.com
Supplier Description · 575.1 KB · Click any page to view full size
Related Tutorials
Free guides on learn.littlebird.com.au


{kind=link}